AUTOSAR的RTE机制,说白了就是汽车软件里的交通指挥官,它管着各个软件组件怎么打招呼、怎么传纸条,这套规矩直接决定了你的车机响应快不快、系统稳不稳定。
端口与接口的通信规则
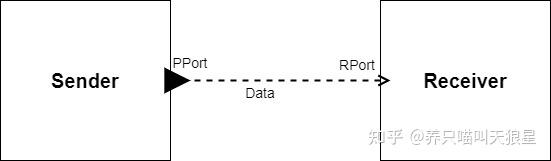
数据传输的两种模式
在AUTOSAR架构里,Sender-Receiver通信模式支持1对多和多对1。比如一个车速传感器可以同时把数据发给仪表盘、导航和自动驾驶模块,这就是典型的1:N场景。反过来,多个轮速传感器把数据发给同一个车身稳定系统,这就是N:1的应用。
函数调用的单向特性
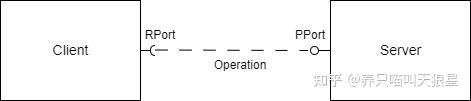
Client-Server通信模式就规矩多了,只能N个客户端调用1个服务器。想象一下,多个应用软件都想请求同一个电源管理服务的状态,它们只能排队调用,不能一个应用同时请求多个服务。这种设计保证了系统调用的有序性,避免资源冲突。
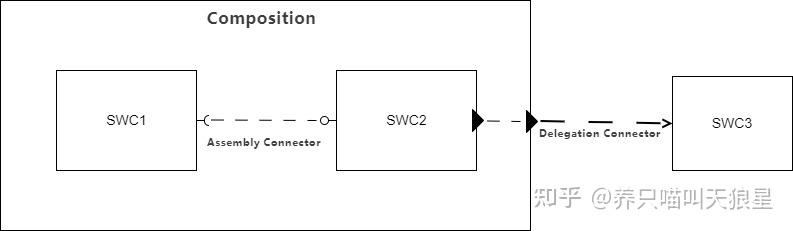
连接器的实际角色
软件组件间的桥梁
连接器就是SWC之间的电话线,它定义了数据交换的格式和路径。在2023年某款量产电动车上,就有超过200个这样的连接器,把座椅控制、车窗升降、空调调节这些功能模块连在一起。
与外部模块的接口
连接器还负责ECU和外部世界的沟通。比如门控模块通过特定的连接器读取门锁状态,这个接口定义了电压范围是0-5V,采样频率是100Hz,确保数据采集的准确性。
运行实体的执行机制
事件触发的执行方式
运行实体就是一段段具体的功能代码,它们由RTE事件唤醒。比如每10毫秒的定时器到了,就会触发一个运行实体去读取油门踏板的开度。在博世的一款发动机控制器中,就部署了超过50个这样的运行实体。
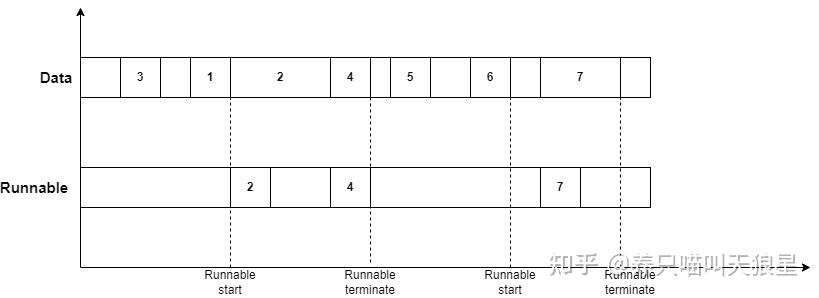
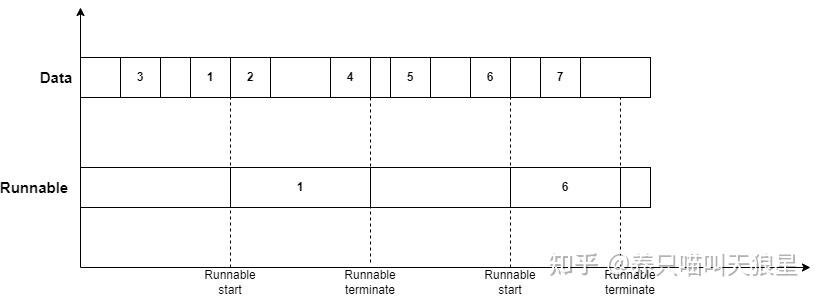
数据访问的具体操作
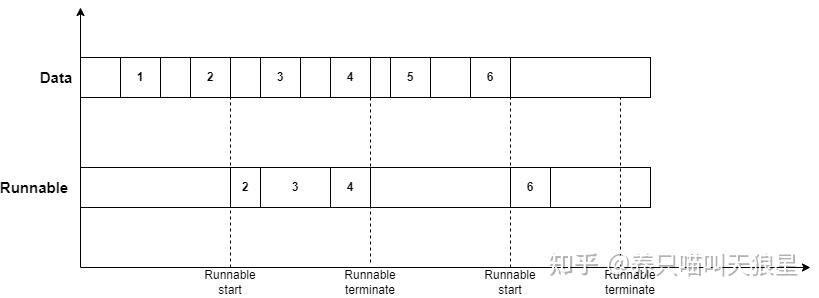
显式访问时,开发人员可以直接调用RTE API来读写数据。比如用Rte_Read函数读取传感器值,这个值会实时变化。隐式访问则不同,RTE在运行实体开始前先把数据复制一份,执行结束后再把结果写回去,期间多次写同一个数据只保留最后的值。
阻塞与非阻塞通信
同步调用的应用场景
当动力系统请求扭矩数据时,通常会采用阻塞模式,调用方必须等到服务器返回结果才能继续运行,这确保了关键数据的可靠性。在紧急制动场景中,这种机制保证了制动力请求100%被响应。
异步通信的优势
非阻塞模式用于不那么紧急的场景,比如中控屏读取天气预报。应用程序发出请求后可以继续做自己的事,等数据回来再处理。这种设计避免了UI卡顿,提升了用户体验。
内部通信的一致性保障
变量级保护机制
当两个运行实体分别在不同的任务中访问同一个变量时,可以使用IOC机制来保护。例如在某个双核芯片上,核0上的控制算法和核1上的诊断功能共享电池电压值,通过IOC确保读写操作不会互相干扰。
区域保护策略
对于复杂的共享资源,可以采用区域保护。比如在访问一组传感器融合数据时,在进入区域前锁定中断,处理完成后解锁。这种机制保证了在数据更新过程中,不会被其他任务打断,确保了数据的完整性和一致性。

任务调度与事件触发
RTE与操作系统的映射
RTE的配置最终都会转化为OS的具体任务。比如把所有10毫秒触发的运行实体放在同一个周期任务中,把20毫秒触发的放在另一个任务中。这种分组策略优化了CPU的负载分配。
事件机制的抽象价值
通过RTE事件来触发运行实体,SWC开发者不用关心底层是用的什么操作系统、任务优先级怎么设。比如在从AUTOSAR 4.2升级到4.4时,底层任务调度变了,但上层的SWC代码完全不用修改,这大大降低了开发成本。
说到这里,我想问问你:在你接触过的车载项目中,是数据一致性难保证,还是通信延迟更难处理?欢迎在评论区分享你的经验,点个赞让更多同行看到这篇文章。