
ROS机器人在操作系统中,节点间的信息交流主要依赖通信协议,这一方式至关重要。该协议包含多种类型,能够满足各种场景的需求。接下来,我将逐一详述ROS中较为常见的几种通信协议。
话题通信采用发布/订阅机制。这属于一种非同步的通信形式,其中某个节点负责发布信息,而其他多个节点则有权限订阅这些信息。信息的流动方向是单行的。此模式特别适合于传感器数据的即时传输,例如激光雷达和摄像头采集的数据。同时,它也适用于传播机器人的位置、速度等状态信息。例如,在巡检机器人中,可以通过这种方式将摄像头捕捉到的画面实时传输到监控端。
在示例代码里,发布者需事先声明将要发布的内容主题,而订阅者则需订阅这些主题并配置相应的回调函数来处理接收到的信息。
服务通信
服务通信遵循请求/响应的同步模式,这种模式具有双向特性。一般而言,客户端会向服务器发送请求,服务器在接收到请求后进行响应。这种模式常用于执行任务请求,例如控制机器人运动或规划路径等需要明确响应的任务。此外,在系统配置管理过程中,如调整参数或启动/停止任务时,也会采用这种通信模式。在具体运用中,若需让机器人移动至特定地点,我们可通过服务通信功能来进行操控。
在服务端要发布服务,客户端创建访问服务的实例。
动作通信
动作通信适合于那些持续时间较长、可能需要即时回应以及能够随时停止的任务。相较于服务通信,它具有更高的灵活性,使得客户端能够实时掌握任务执行的情况。比如,当机器人执行巡逻任务时,若巡逻过程持续时间较长并且需要实时了解其位置和进度,这种通信方式就尤为适用。它能够更有效地满足复杂场景的需求,确保执行情况能够迅速且精确地传达。
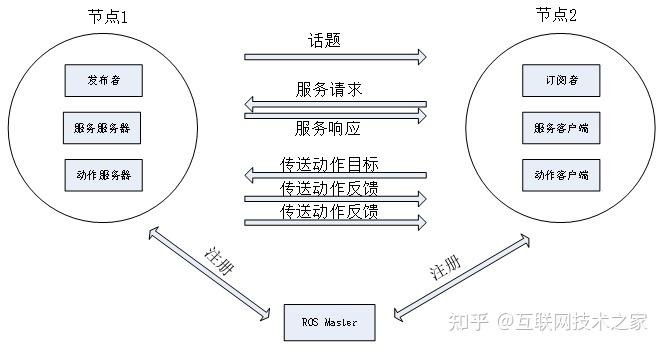
和另外二者不同的是,动作通信包含目标、反馈和结果三个部分。
参数服务器
参数服务器充当着全局配置的角色,它允许节点存储和检索参数。这为机器人系统的配置提供了便利,使得修改配置变得简单,无需修改代码。在多机器人协作的场合,我们可以在参数服务器中为不同的机器人设定各自的功能。针对不同的工作环境,我们可以选用不同的参数配置组合。这些配置可以在不同环境中迅速切换。
这种设计让机器人能够轻松应对各种变化,通过节点与参数服务器之间的通信,机器人能够方便地进行参数的增加、删除、修改和查询操作。
节点内通信
节点内通信主要服务于同一进程内不同组件间的信息交换,这种方式传输迅速,数据处理效率高,有助于降低延迟和成本。对于对实时性要求较高的机器人应用而言,这种通信方式至关重要。以机器人视觉处理模块为例,节点内通信能够迅速处理数据,使得图像识别和后续处理过程更加顺畅,非常适合资源受限的环境,有助于减少资源消耗。
在复杂的机器人系统中,我们能够将多种功能集成到一个节点之中,而且节点内部还能实现灵活的交互。
这些通信协议在机器人研发领域应用广泛,请问您对哪一种通信协议在实际应用中的案例更为感兴趣?欢迎在评论区发表您的见解,同时别忘了点赞并转发这篇文章!



